




量子计算场景实用秘籍:开物SDK之“高阶函数降阶”
摘要:由于自动化和智能化的普及,AGV(自动导引车)调度问题在物流、运输和生产领域有着广泛的应用。 随着AGV数量的增加,经典计算方法难以满足大规模调度的需求,而玻色量子自研的相干光量子计算技术具有强大的计算能力,特别是在组合优化问题的求解上表现出无可比拟的性能优势,大大提高了AGV调度的效率和自动化水平。
真机测试结果表明,与经典计算方法相比,基于玻色量子自研的100计算量子比特相干光量子计算机真机🔗,平均可节省92%的计算时间。显然,量子计算在AGV调度问题上的应用,不仅展示了相干光量子计算机的巨大潜力,也为物流自动化的未来发展指明了方向,具有重大的实际应用前景与里程碑式突破意义。

交通物流行业作为劳动密集型产业之一,提高该行业的自动化和智能化水平已成为工业界和学术界的重要课题。正因如此,AGV调度问题在交通物流行业有着广泛应用。
近年来,一些行业龙头企业已经进行了技术改造。例如,零售巨头亚马逊以及中国电子商务公司京东等都建立了庞大的智能仓库,其中使用了大量AGV执行货物的运输作业。此外,AGV还广泛应用于自动化码头、智能工厂等应用场景,极大地提升了作业效率,降低物流成本。
为了满足应用场景的需求,AGV的并行工作量不断增加,这给AGV调度带来了很大的难度。AGV调度问题是十分困难的组合优化问题,使用目前的普通台式电脑与超级计算机来求解,精确算法可以生成好的解决方案,但其计算时间非常长,使其无法用于大规模问题。非精确算法表现出良好的效率,但经常收敛到局部最优,在短时间内提供高质量的调度解决方案成为一项重大挑战。
这类组合优化问题却是量子计算的擅长领域。
国际上,德国量子计算硬件公司Quantum Brilliance,曾与量子软件公司Quantum-South合作,共同开发并销售航运物流优化配套产品和技术。这两家公司与航空和海运运输公司从量子计算概念验证出发,以挖掘量子计算在解决经典计算机范围之外的高度复杂计算问题方面的潜力为主要研发方向。
论文主要介绍通过量子计算技术如何来解决自动导引车(AGV)的调度问题。玻色量子自研的相干光量子计算技术具有强大的计算能力,特别是在组合优化问题的求解上表现出无可比拟的性能优势,大大提高了AGV调度的效率和自动化水平。这项研究具有重大的实际应用前景,突出表现玻色量子联合大连海事大学在 “量子计算+AGV调度”领域率先实现实用化场景应用成果,并具有里程碑式突破意义。
下面我们将给出完整真机测试报告:从AGV调度模型的二次无约束二值优化(QUBO)模型和Ising模型构建方法入手,给出了优化问题目标函数、等式和不等式约束对应 QUBO 模型惩罚项的转换方式,依托玻色量子团队自主研发的“天工量子大脑100”开展了应用测试,验证了相干光量子计算机在解决AGV调度问题和类似组合优化问题方面具备了实用量子优越性。
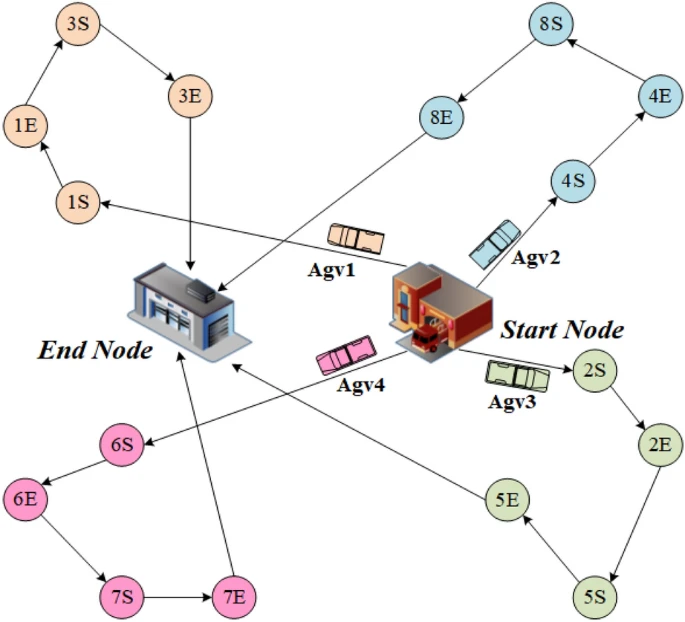
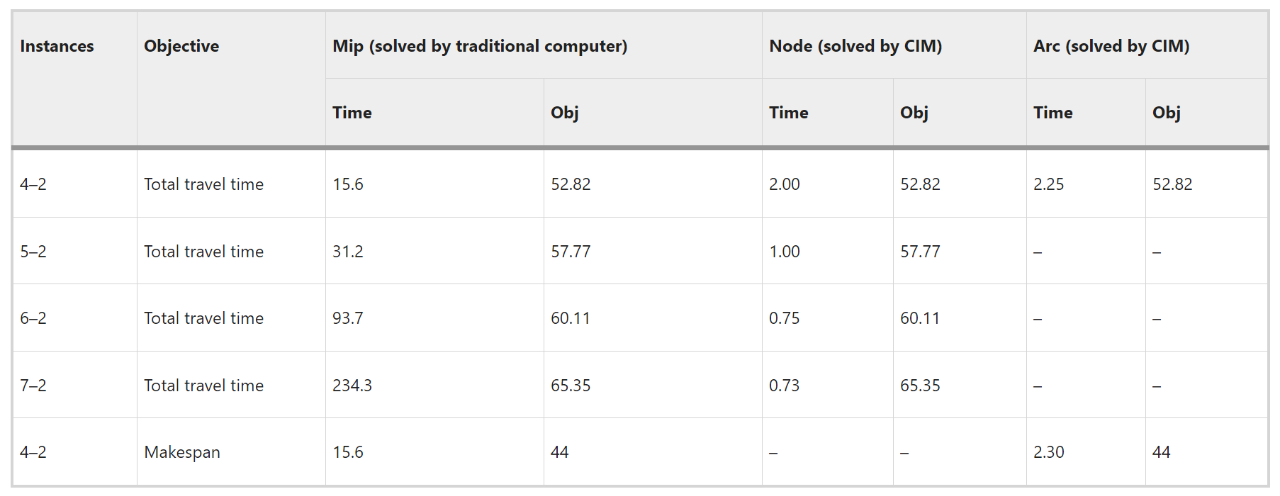
AGV调度问题根据不同的场景和考虑因素有多种分类。例如,考虑任务的时间窗口、调度和路径的联合优化、与其他设备的配合、计费策略等。研究人员简化了复杂场景下AGV调度问题规模,保留了AGV调度问题的本质。在此基础上,构建了AGV调度模型。研究人员提出了基于混合整数规划(MIP)的经典AGV调度模型以及基于QUBO形式的点模型和弧模型。
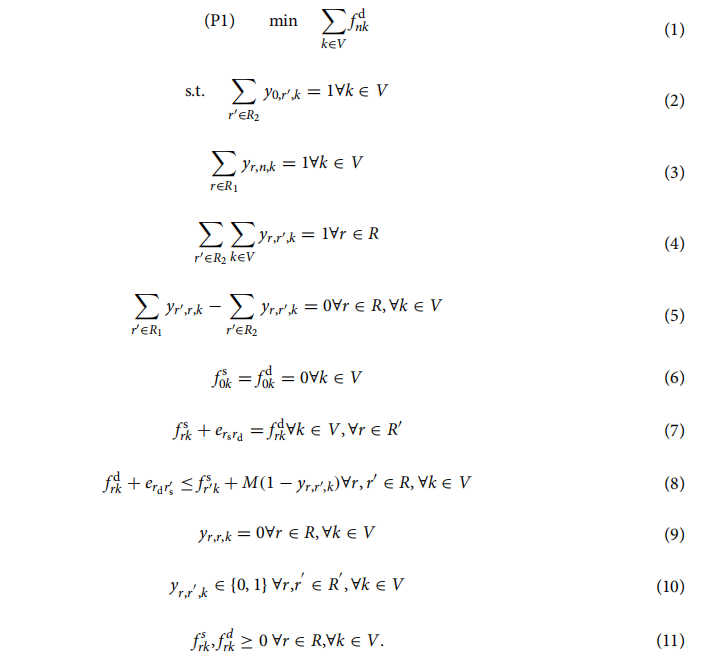

其中T表示任务完成时间makespan。目标函数是最小化T,约束条件(13)表示T必须不小于最后一个AGV完成任务所需的时间。


点模型和弧模型具体构造形式可见论文。
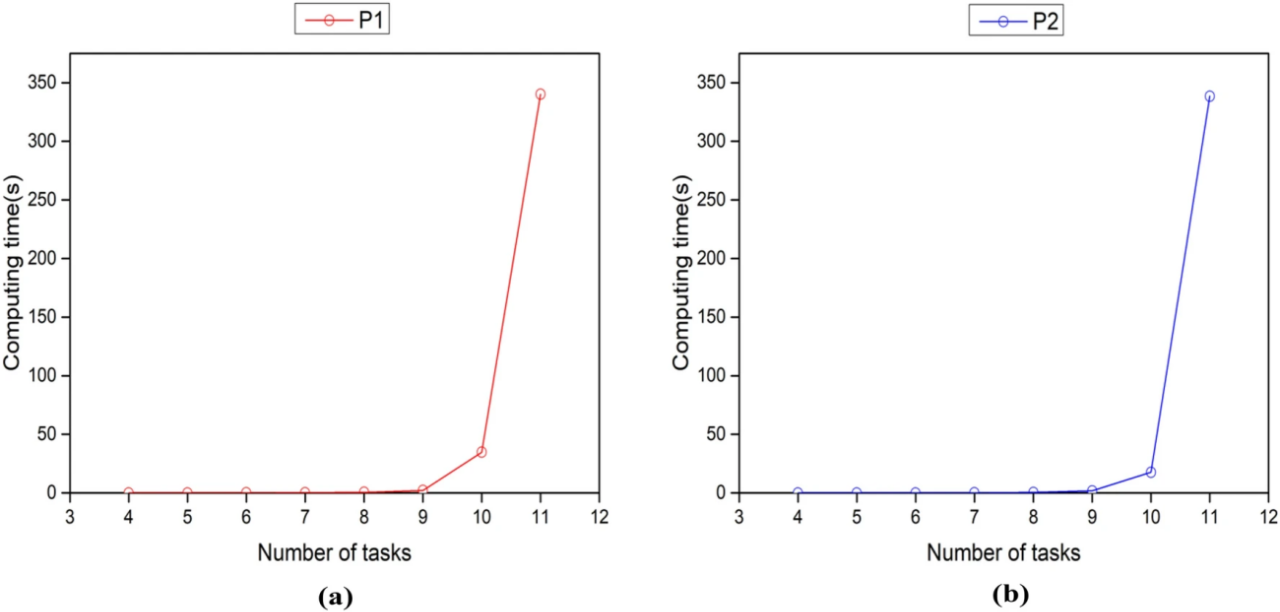
MIP 模型计算时间随任务数量变化图。(a)表示最小化总时间的目标下的MIP模型计算时间随任务数量变化图。(b)表示最小化任务完成时间的目标下的MIP模型计算时间随任务数量变化图。

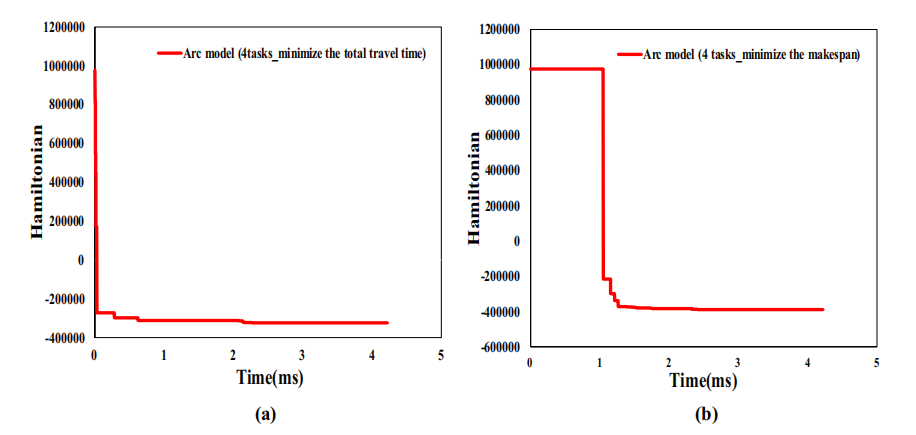
在弧模型中两个目标函数下哈密顿量随时间变化的演化图。(a)表示目标函数为最小化总时间情形下哈密顿量随时间变化的演化图,(b)表示目标函数为最小化任务完成时间情形下哈密顿量随时间演化图。
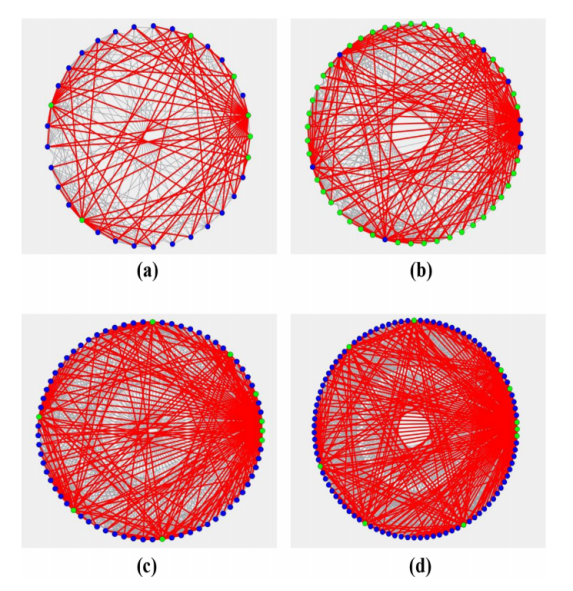
节点模型量子计算解决方案示意图(以最大割问题形式展现)。(a)代表4个任务下的解决方案。(b)代表个项任务下的解决方案。(c)代表6个任务下的解决方案。(d)代表7个任务下的解决方案。
量子计算在AGV调度问题上的应用,不仅展示了玻色量子的相干光量子计算机的巨大潜力,也为物流自动化的未来发展指明了方向。
随着量子计算技术的不断成熟,玻色量子将基于最新550计算量子比特相干光量子计算机——天工量子大脑550W🔗,联合各行业优秀的合作伙伴探索并验证更多“量子计算+”实用化场景,依托量子计算生态产业链,使它将在物流等更多领域发挥革命性的作用,推动社会进入一个更加智能和高效的新时代。
